Introduction
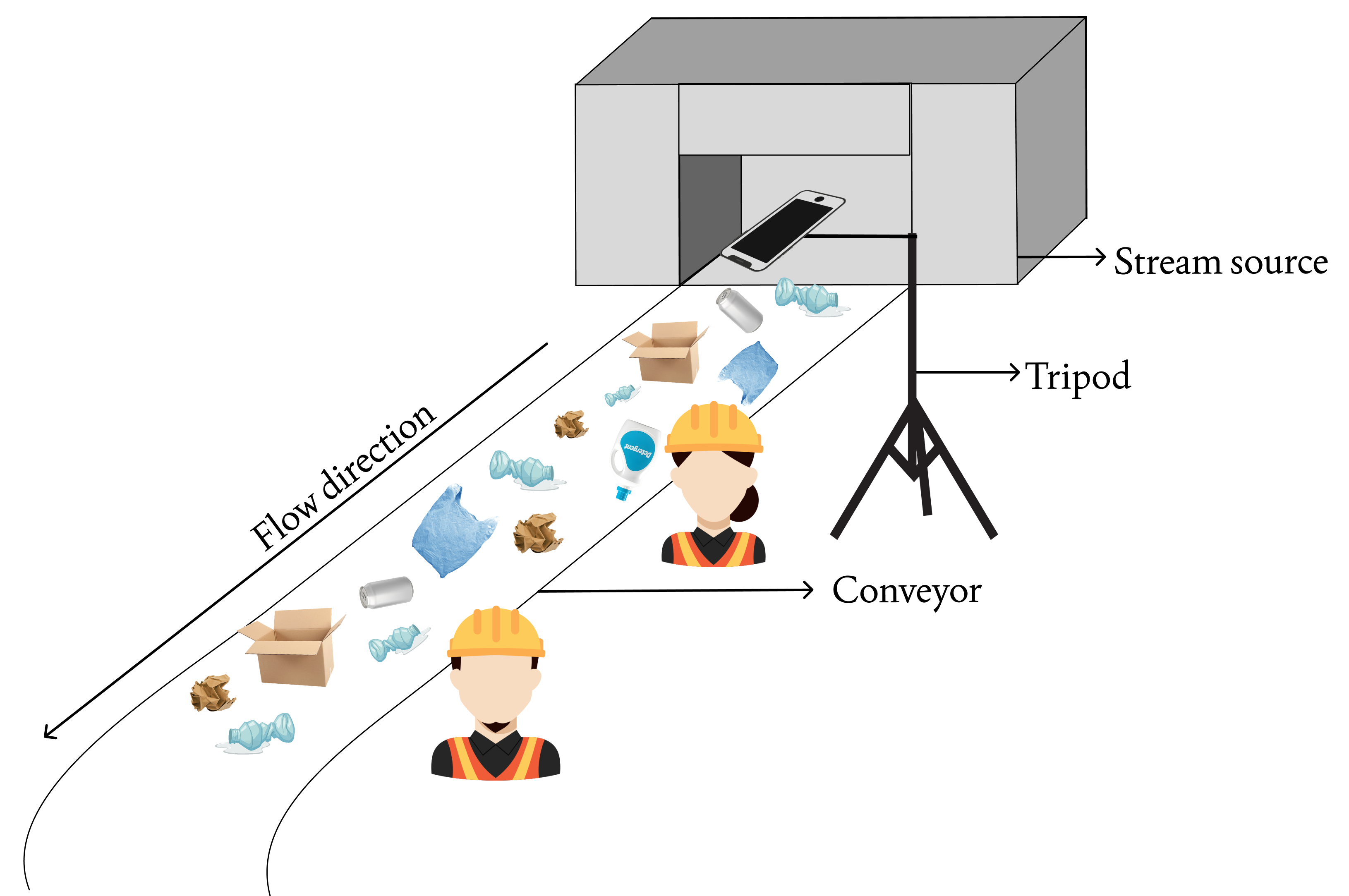
SortWaste is a densely annotated dataset for waste detection created to support research in computer vision for waste management. Collected at an industrial sorting facility, it captures real-world conditions such as cluttered scenes, overlapping objects, and deformed materials, reflecting the visual complexity encountered in operational recycling lines.
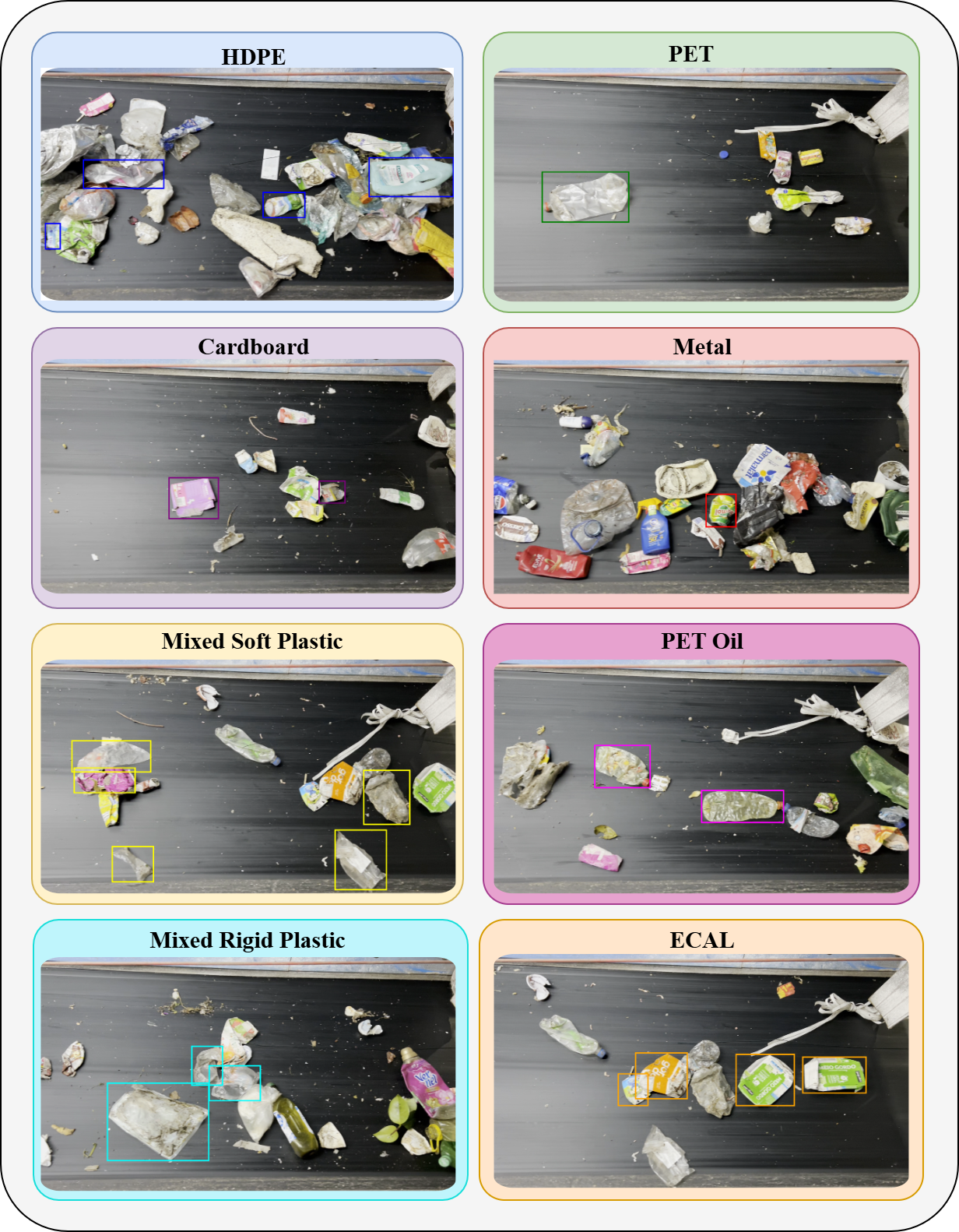
The dataset contains high-quality labeled images across 8 waste categories and a range of environmental conditions. By providing accurate and consistent annotations, SortWaste aims to accelerate the development of automated sorting systems and contribute to more efficient recycling and resource recovery.

Annotated examples from SortWaste